Sumo Robot
Spring 2012: Mechatronics
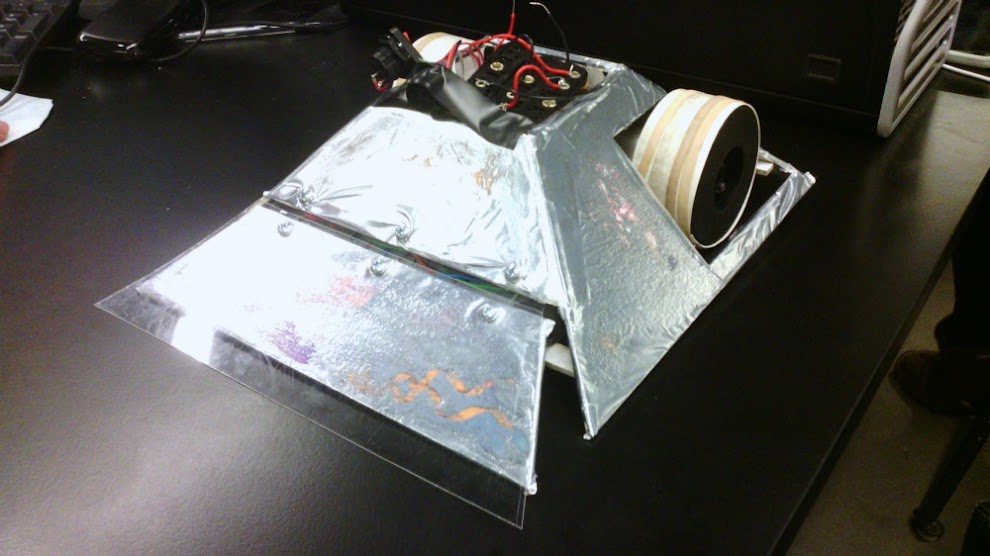
The sumo robot, seen in the above picture, was built with Andrew Novak ’13 and Moshe Hamaoui ’13 for the course ME153: Mechatronics taught by Professor Cusack. The goal of the course was to have the robot compete in a Sumo Robot competition against other robots in the class (video below). The robot had to be capable of staying within a black ring with white borders. Our particular robot was also equipped with a sonar detector that it used to find other robots (see video below). The reflective coating is used to trip other robots’ IR sensors and cause them to turn around while attacking. The clear piece of flexible plastic on the front laid flat on the ground, ensuring that our robot was able to get under its competitors
Object Detection
Battle
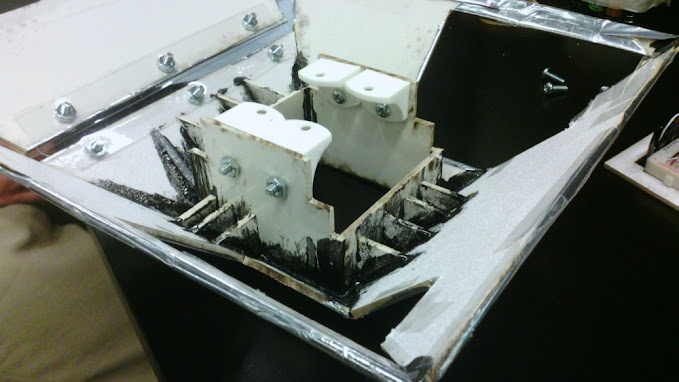
View of underside of chassis

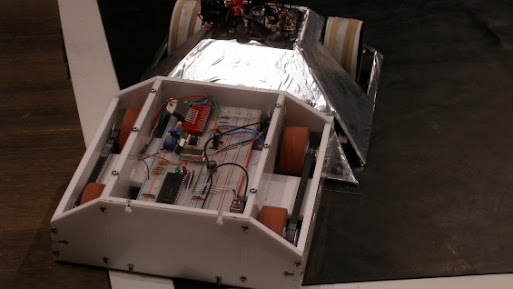
Assembled chassis prior to reflective coating
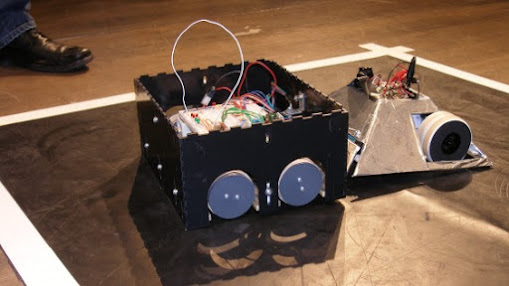
Sumo Competition
Sumo Competition
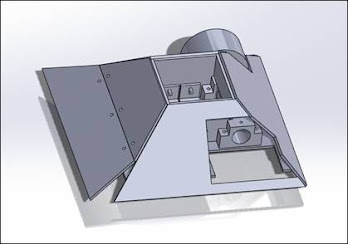
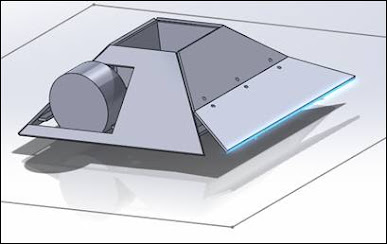
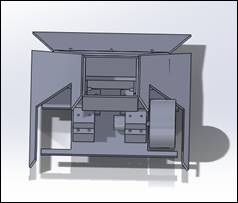
Solidworks 3D Model
While we did not win the final competition, the robot performed well despite having it's microcontroller explode just thirty minutes before the competition. The recovery led to a mention in the article http://cooper.edu/about/news/robot-battle-end-semester. Where the professor called it "one of the coolest stories". The excerpt is below:
“One of the coolest stories happened behind the scenes minutes before competition started,” he adds. “One team crossed a wire and literally blew up their microcontroller. I handed them the key to my office and said ‘get a new microcontroller, program it, rewire it, and be back in 25 minutes.’ They were back in 20—with a functioning robot. I wager those 20 minutes were more stressful than any other final they had this year, but they passed this one with flying colors."